Sign In / Sign Out
- SIGN IN
- SIGN OUT
We are integrating actuators with humans
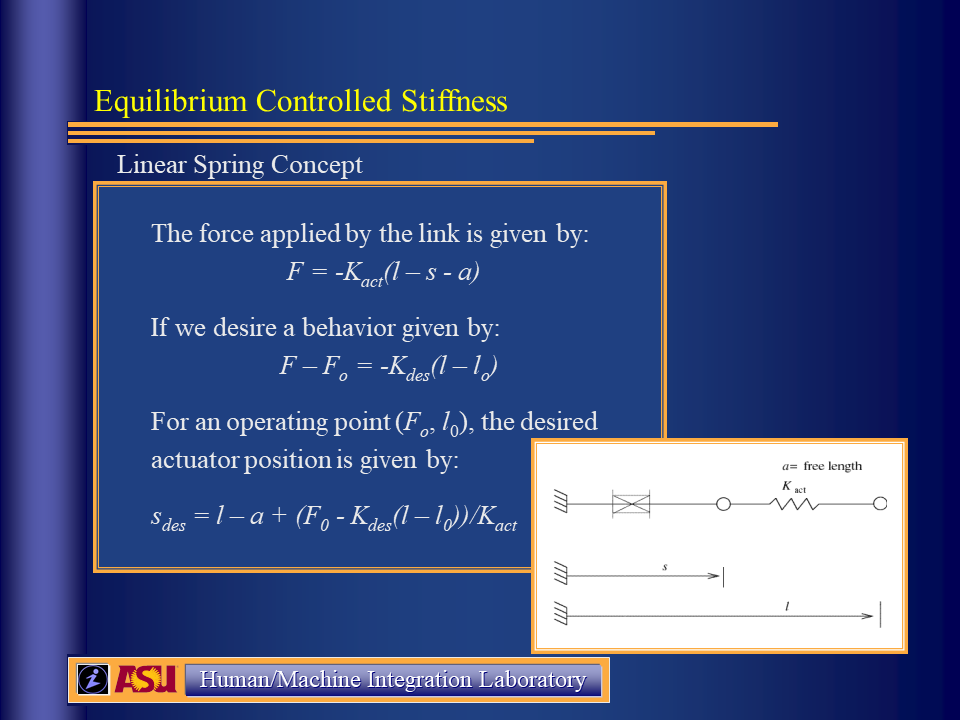
Control the input side of the spring to adjust the virtual stiffness and pre-load force
We designed a robotic tendon actuator for powered prostheses and orthoses
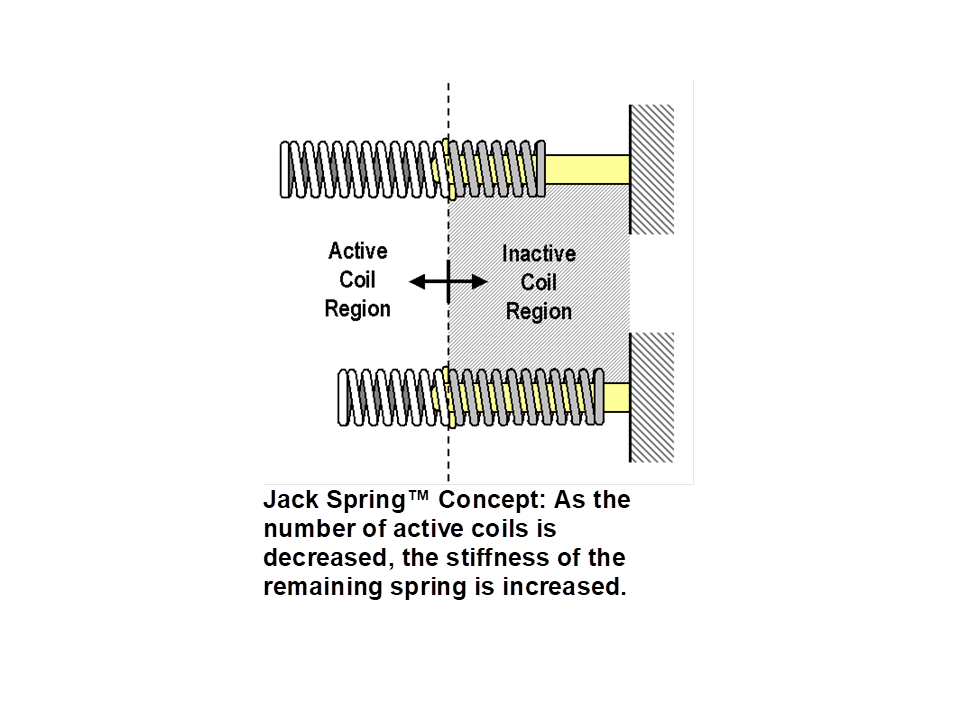
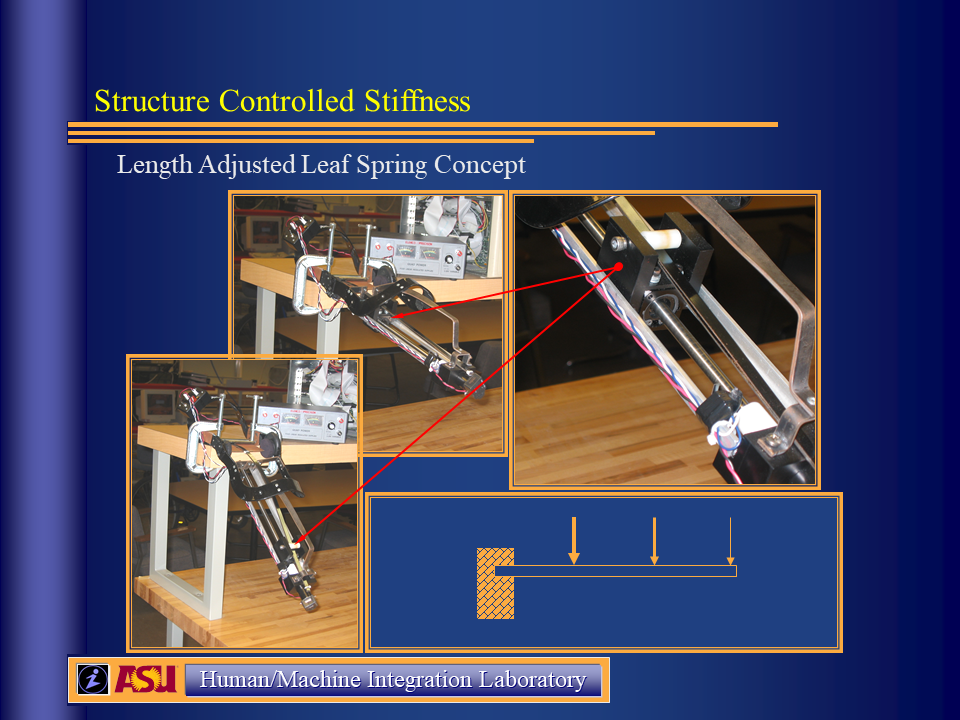
Adjust the structure of springs to change the stifness properties
A nut is actively driven into the helical pattern of coil spring. The spring stiffness and length are both adjusted at the same time.
Change the length of the leaf spring
Rotate a leaf spring to change the structure

